Chapter 5 物理优化
0. 理解物理引擎
Unity 有两个物理引擎:Nvidia PhysX(3D)和 Box2D(2D)。它们都以固定时间步长(fixed timestep)运行,而不是以渲染帧率运行。这意味着 FixedUpdate() 以固定间隔被调用,与 Update() 不同。
0.1 物理和时间
- 物理引擎假设时间以固定值推进。
Time.fixedDeltaTime控制固定更新的间隔,默认值通常是 0.02 秒(50 Hz)。- 如果一帧耗时过长,物理引擎可能需要在同一帧内多次调用
FixedUpdate()来追赶时间。
0.2 Maximum Allowed Timestep
Time.maximumAllowedDeltaTime(或 Physics 设置中的 Maximum Allowed Timestep)限制了物理引擎在单帧内追赶的最大时间。- 如果一帧耗时超过这个值,物理引擎会限制
FixedUpdate()的调用次数,避免陷入”死亡螺旋”(即物理计算导致更长的帧,进而需要更多物理计算)。 - 合理设置可以防止卡顿导致物理爆炸或性能崩溃。
0.3 静态碰撞体与动态碰撞体
- 静态碰撞体(Static Collider):没有 Rigidbody 的碰撞体。它应该保持静止,移动它会带来较大的性能开销,因为物理引擎需要重新构建其空间数据结构。
- 动态碰撞体(Dynamic Collider):带有 Rigidbody 的碰撞体。它们由物理引擎模拟。
- 如果需要移动一个没有物理模拟的碰撞体,最好给它加上 Rigidbody 并勾选 Is Kinematic,而不是直接移动 Static Collider。
0.4 碰撞检测模式
- Discrete(离散):默认模式。每帧根据速度移动物体,然后进行边界体积检查。最快,但可能穿过高速小物体。
- Continuous(连续):对静态碰撞体进行连续碰撞检测,更精确但更贵。
- Continuous Dynamic(动态连续):对静态和动态碰撞体都进行连续检测,最贵。
- Continuous Speculative(推测连续):较新的模式,在某些情况下比 Continuous Dynamic 更高效。
0.5 碰撞器类型
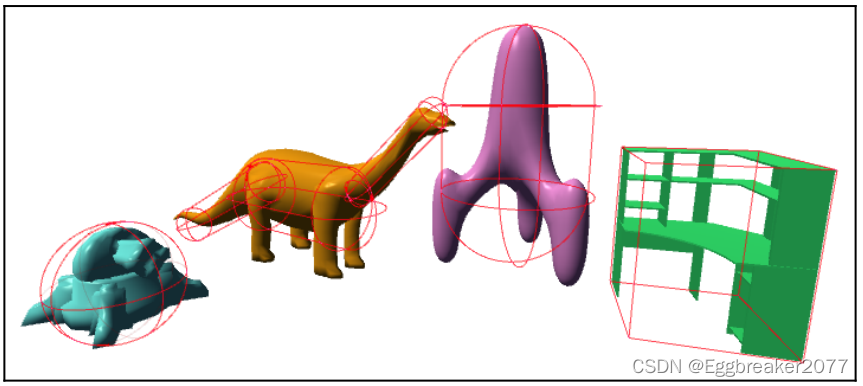
- 从快到慢排序:Sphere / Capsule / Box < Mesh Collider(简单网格)< TerrainCollider / WheelCollider / Cloth / 复杂 Mesh Collider
- 优先使用原始碰撞器(球体、胶囊体、盒子),用多个简单碰撞器组合近似复杂形状。
0.6 调试物理
-
使用 **Window Analysis Physics Debugger** 可视化碰撞体、休眠状态、接触点等。 - 在 Profiler 的 Physics 区域查看物理耗时。
1. 场景设置
1.1 缩放
- 尽量使所有物体的缩放为 (1, 1, 1)。
1.2 位置
- 所有物理物体尽量接近 (0, 0, 0) 的位置,以便提升浮点运算精度。
1.3 质量
- 避免有超大质量值。
- 相互碰撞的物体,质量比尽量控制在 1:100 以内。否则可能出现浮点精度丢失和不稳定的物理现象。
- 如果质量比确实需要过大,可以使用碰撞矩阵进行剔除,来避免问题发生。
2. 恰当使用静态碰撞体
- 不要让没有 Rigidbody 的碰撞体移动。如果必须移动,添加 Rigidbody 并勾选 Is Kinematic。
- 静态碰撞体适合地面、墙壁、不可破坏的建筑等固定物体。
3. 负责任地使用触发器
- Trigger 碰撞体也会产生碰撞检测开销。尽量减少同时存在的大型触发器数量。
- 使用 Layer Mask 让触发器只与需要检测的对象交互。
- 在
OnTriggerEnter/Stay/Exit中避免复杂计算。
4. 优化碰撞矩阵
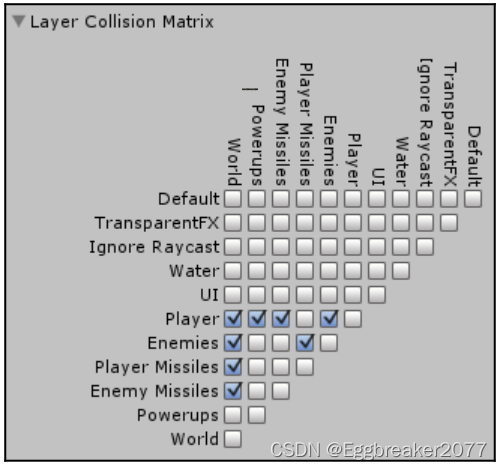
- 将不需要碰撞的层都去掉,这样能减少每次 FixedUpdate 时必须检查的边界体积数量。
5. 首选离散碰撞(Discrete Collision)
- 连续检查(Continuous)消耗高出一个数量级。
- 动态连续检查(Continuous Dynamic)再高出一个数量级。
6. 修改 Fixed Update 频率
- 为了让离散碰撞更容易被检测到,可以通过修改
Time.fixedDeltaTime来完成。 - 最好使用测试场景测试修改后的效果,看是否符合碰撞要求。
7. 调整 Maximum Allowed Timestep
-
在 **Edit Project Settings Time** 中调整 Maximum Allowed Timestep。 - 这个值限制了单帧内物理引擎追赶的最大时间。设置过小可能导致物理在卡顿后”跳过”;设置过大可能导致卡顿后物理计算过多,进一步拖慢帧率。
- 根据项目需求测试并选择合适的值。
8. 最小化射线检查和边界体积检查
- 使用 Layer Mask 把不需要检查的直接过滤掉。
- 减少射线数量,合并多次检查,或使用空间分区结构(如 Octree)提前剔除。
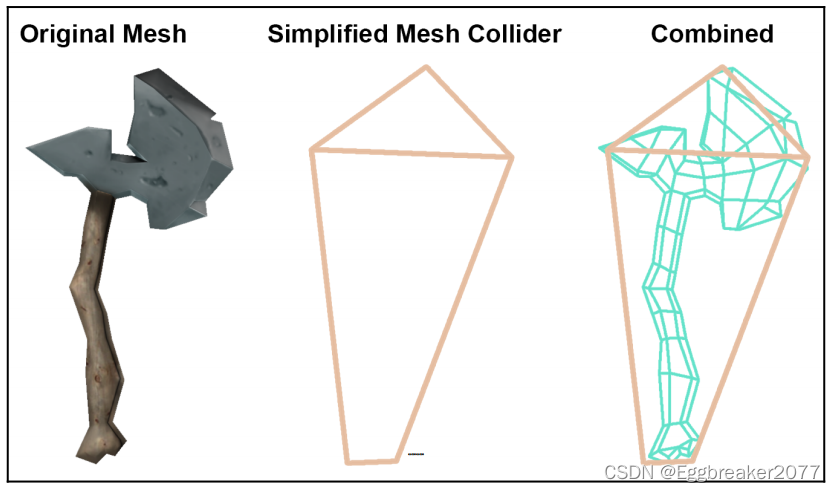
9. 避免使用复杂的网格碰撞器
- 使用几个基本碰撞器进行拼装组合
- 使用更简单的网格用于碰撞
10. 避免使用复杂的物理组件
- 例如 TerrainCollider、Cloth、WheelCollider。
- 这几个组件的消耗高出几个数量级。
11. 使物理对象休眠
- Unity 会对速度小于设定阈值的 Rigidbody 对象进行休眠,以提升性能。(在 Physics / Sleep Threshold 中设定阈值)
- 修改 Rigidbody 的任何属性都会重新唤醒对象。
- 避免出现岛屿效应:大量刚体互相接触,任意一个刚体被唤醒时,由于碰撞,会导致其他大量刚体同时唤醒,然后出现性能尖峰。
12. 修改处理器迭代次数(Solver Iteration Count)
- 当关节(Joint)、弹簧(Spring)等方法连接刚体时,由于刚体间相互依赖的交互作用,系统需要进行多次迭代计算来得到精确的结果。
- 在不影响物理表现的情况下,可降低最大迭代次数。默认设置:Physics / Default Solver Iterations。
- 在出现高需求时,可以用
Physics.defaultSolverIterations来增加迭代次数。这个属性只影响之后新生成的刚体,所以我们可以在生成特定刚体前增加迭代次数,生成后再将这个属性改回来。 Physics.defaultSolverVelocityIterations能改变基于关节碰撞期间的速度迭代次数。如果布娃娃出现碰撞问题,可尝试增加此值。- 2D 中对应的是:Position Iterations 和 Velocity Iterations。
13. 优化布娃娃(Ragdolls)
13.1 减少关节和碰撞器
- Unity 默认创建的布娃娃有 13 个碰撞器。很多时候只用 7 个也有过得去的效果(骨盆、胸部、头部、四肢)。
13.2 避免布娃娃之间碰撞
- 布娃娃之间的碰撞消耗性能是指数级的。
- 合理使用碰撞图层来规避不必要的碰撞。
13.3 替换、禁用或移除不活跃的布娃娃
- 当敌人死亡并进入布娃娃状态后,如果不再需要精细的物理表现,可以在几秒后禁用 Rigidbody、切换到预设的死亡姿势动画,或完全移除布娃娃组件。
- 这可以释放物理计算资源,避免大量尸体持续消耗 CPU。
14. 知道何时使用物理
- 不是所有移动都需要物理。简单的移动、旋转、碰撞检测可以用代码或射线检测实现,而不必引入 Rigidbody。
- 对于不需要真实物理反馈的物体,考虑使用
Collider+ 手动代码处理,而不是完整的物理模拟。 - 在大量对象需要简单碰撞时,考虑自定义碰撞系统或空间分区,而不是依赖 PhysX。